电机控制的本质是磁场控制
电机控制的本质是磁场控制,不理解这一点,后面全是坑。
很多人第一次接触电机时,会被一堆名词淹没:定子、转子、有刷、无刷、PMSM、FOC、PID、三相电、伺服。看完之后脑子里往往还是一团浆糊。问题不是数学不会,是没有建立“电机到底是什么”的直觉。工程世界里最重要的东西恰恰是直觉——这篇文章从完全没有概念的状态出发,把电机控制、FOC、振镜系统串成一条线。
电机就是磁铁互相拉扯
先忘掉所有术语。BLDC、PMSM、步进电机、感应电机,统统放一边。电机本质上只有一件事:磁铁互相吸引或排斥。小时候玩磁铁就知道,N 极靠近 S 极就吸引,N 极靠近 N 极就排斥。电机做的事情就是让这种吸引和排斥不断变化,东西就持续转动。
核心过程只有四步:电 → 磁场 → 力 → 转动。电机不是电直接变成机械能,而是电先变成磁场,磁场再互相作用。理解了这一点,后面所有内容都在这个框架里。有了基础,定子和转子的概念就非常直白:定子(Stator)固定在外,作用是产生磁场;转子(Rotor)在内部旋转,被磁场拖着转。
换向的进化:从电刷到电子
电机要持续旋转,但线圈电流方向不能永远不变。转半圈后磁场方向会错,电机会卡住,所以必须每转半圈切换一次电流方向,这叫换向(Commutation)。
早期工程师的方法很直接:做一个机械开关,转到特定位置时自动把电流反过来。这个结构叫电刷(Brush),因为早期真的是碳刷。使用电刷、用直流电、机械换向的电机,就是有刷直流电机(Brushed DC Motor)。
电刷会磨损、打火花、产生噪声,于是工程师想:能不能不用电刷,用电子电路来决定什么时候给哪相线圈通电?这就是无刷直流电机(BLDC,Brushless DC Motor)。
换向方式的进化线上还有两种常见电机。步进电机(Stepper Motor)不连续旋转,而是一步一步跳——控制器依次给各线圈通电,转子被吸向下一个位置,每一步都是离散步数。
感应电机(Induction Motor)更特别:转子没有直接供电,定子产生旋转磁场扫过转子导体,根据法拉第电磁感应定律(
现代工业最主流的是 PMSM(Permanent Magnet Synchronous Motor,永磁同步电机):转子用永久磁铁,转速和磁场同步。BLDC 和 PMSM 的核心区别在于反电动势波形——BLDC 是梯形波,PMSM 是正弦波,但本质上都是无刷永磁电机,只是驱动策略不同。
FOC:把磁场拆成两个旋钮
电机控制真正控制的是什么?很多人以为是电压,其实是电流。电流产生磁场,磁场产生力矩,核心关系是
现代电机几乎都基于三相交流——A 相、B 相、C 相,相位彼此差 120°,三相轮流推就产生旋转磁场。问题在于三相电流是三个随时间变化的正弦波,直接控制非常困难。
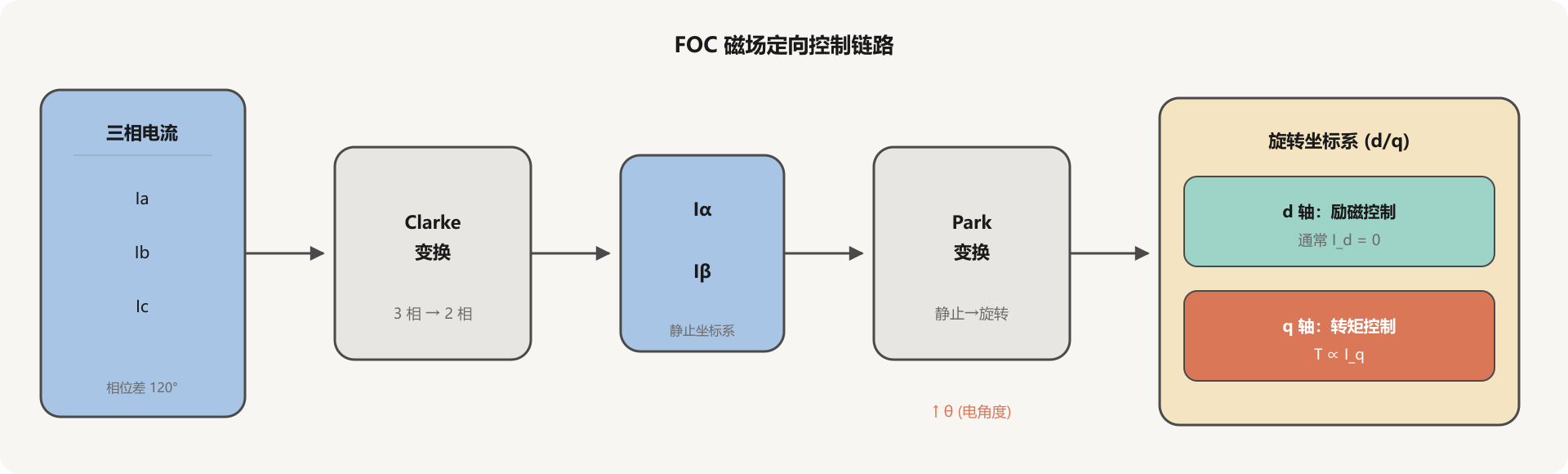
FOC(Field Oriented Control,磁场定向控制)通过 Clarke 变换和 Park 变换,把 A/B/C 三相映射到 d/q 两个正交坐标轴上,励磁(d 轴)和转矩(q 轴)就能独立控制。通常令
但调试真正难的不是代码,是系统稳定性。整个链条是 PWM → 电流 → 磁场 → 力矩 → 转速 → 反电动势 → 再影响电流,这是一个强耦合动态系统。
典型的坑包括:MOSFET 上下桥必须留死区时间,否则电源短路;电流采样时刻必须对准 PWM 中心,否则全是噪声;FOC 最怕电角度错位,转子角度不准会导致磁场方向错,电机发热、抖动、电流暴涨;PID 整定更是经典难题——P 大了振荡,P 小了软绵绵,D 大了引入高频噪声,I 大了积分饱和。
振镜:当电机变成高动态伺服
很多人第一次做振镜时会发现:明明电机能转,为什么镜子就是不稳定?因为振镜已经不是普通电机控制,而是高动态伺服系统——要求极快、极准、极稳,不能过冲、不能共振、不能延迟、不能抖动。
振镜本质上像弹簧加惯性块,天然有共振频率。在某些频率下系统会突然剧烈振动,工程师不得不加滤波、做阻尼、调 PID、做陷波滤波器(Notch Filter)。这时候问题已经不只是电机,而是控制系统工程。
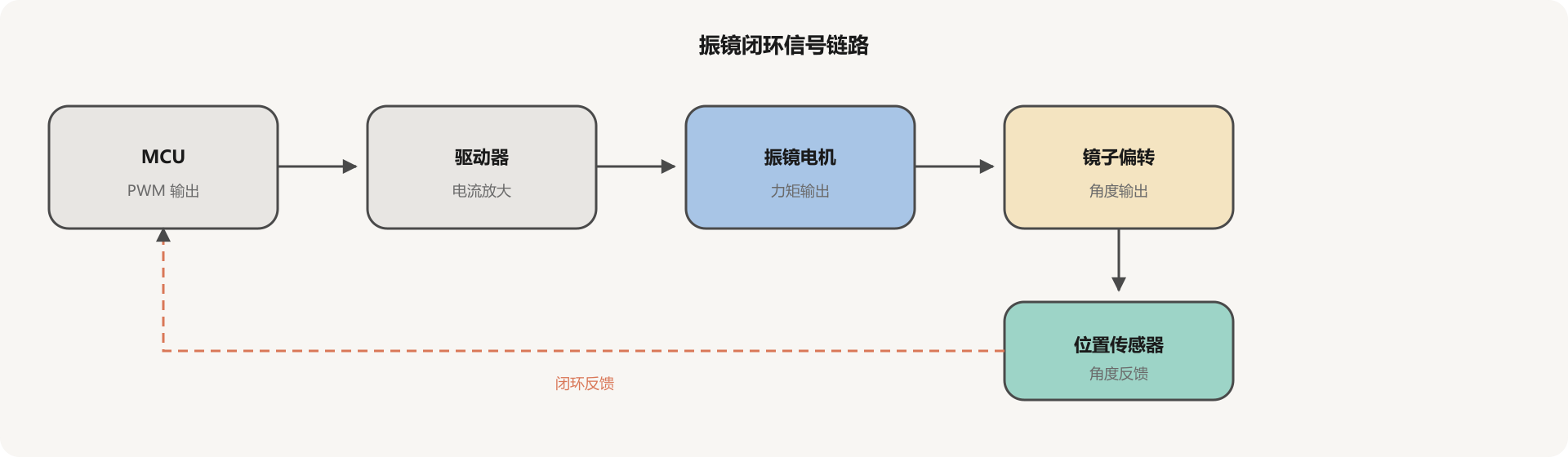
信号链路是闭环的:MCU → 驱动器 → 振镜电机 → 镜子转动 → 位置反馈 → MCU,每个环节的延迟、噪声、非线性都会叠加。新人常以为有现成 SDK 就能搞定,现实是 SDK 只帮你完成基础数学,真正困难的依然是参数整定、时序配合、采样质量、噪声抑制和机械结构。
一个高级的电机工程师,脑子里不再只是电压、电流、MOS 管这些器件参数,而是一个正在空间中旋转的磁场。他们调试时真正调的,是磁场的形状、方向和强度。
下次打开 FOC 调试界面,试试先在脑子里画出那个旋转的磁场,再动鼠标。当你不再盯着电流波形发呆,而是去想象磁场在空间中的运动,那些曾经莫名其妙的振荡和发热,突然都有了物理意义。