车载 gPTP 时间同步:从原理到实现
gPTP 的核心是用硬件时间戳消除网络传输的不确定性,让车内所有 ECU 共享微秒级时钟。
一辆时速 120 公里的车,1 毫秒驶过 3.3 厘米。激光雷达和摄像头的数据如果相差 1 毫秒,障碍物检测就会出现 3.3 厘米的空间错位——足以产生误判。
域控制器上跑着数十个 ECU 节点,每个节点用独立的晶振计时。晶振频率有微小偏差,几小时累积下来就是毫秒级漂移。要让多个传感器在同一时间基准下对齐,就需要一个机制把所有本地时钟校准到同一个源头。这就是 车载网络 中 gPTP 协议要做的事。
从 NTP 到 gPTP
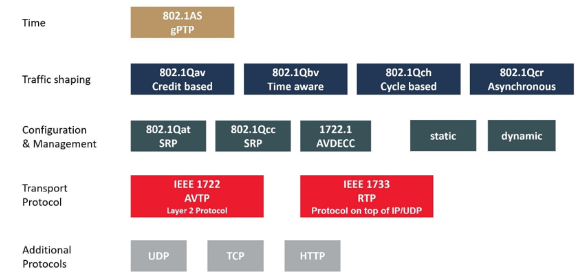
时间同步领域有三个主流协议。NTP 通过 GPS 卫星接收时间,精度在毫秒级,通常在软件层实现,无法满足车载场景的需求。PTP(IEEE 1588)将时间戳处理下沉到硬件 MAC 层,精度提升到亚微秒级。gPTP(IEEE 802.1AS)是 PTP 针对车载和工业场景的裁剪,在三个方面更严格:
- 传输延时测量:仅支持 P2P 方式,每个桥接节点独立测量报文驻留时间并补偿,精度高于 E2E 方式
- 时间戳采样:仅在 MAC 层采样,避免操作系统调度引入的不确定性
- 时钟同步模式:仅支持双步模式(Sync + Follow_Up),降低对 MAC 硬件的要求
P2P 方式中桥接节点记录报文驻留时间并补偿;E2E 方式只测端到端总延时,对中间设备要求低但误差大。双步模式将 Sync 报文的时间戳拆到 Follow_Up 报文中携带。
AUTOSAR 规范在 gPTP 基础上进一步裁剪。不支持 BMCA(最佳主时钟算法),因为车载网络是静态的,GrandMaster 通常固定为网关。不支持 Announce 和 Signaling 报文,减少不必要的网络开销。允许带 VLAN 信息的报文,前提是网关支持转发预留多播地址 01:80:C2:00:00:0F。
gPTP 的三个核心机制
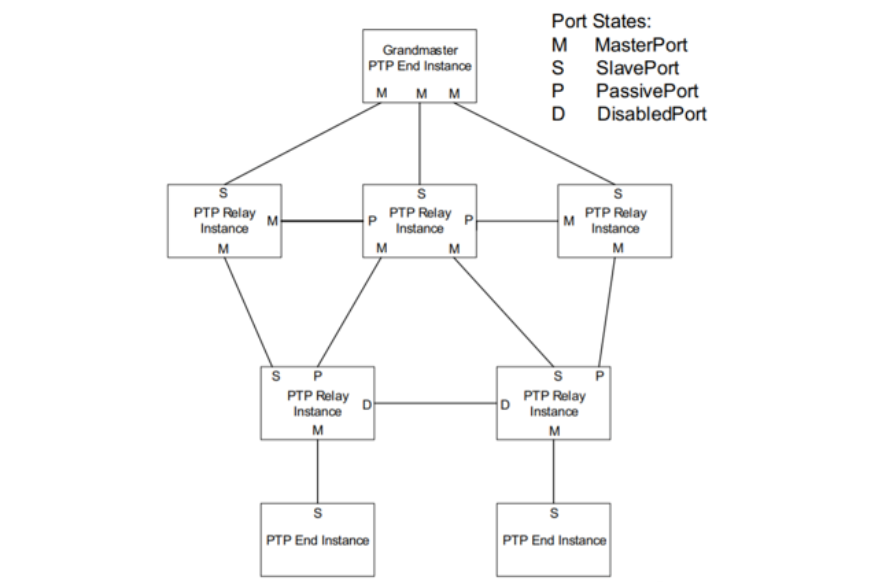
gPTP 网络按「域」划分,每个域有且仅有一个 GrandMaster(全局主时钟)。节点分两类:End Instance(端节点,可作主可作从)和 Relay Instance(交换节点,接收并转发时间信息)。
从节点要完成三件事才能与主时钟同步:频率同步、延迟测量、偏差校正。下面依次拆解。
频率同步
每个节点的晶振频率有细微差异。100 秒内,A 节点可能计了 99.998 秒,B 节点计了 100.001 秒。频率同步的目标是让从节点算出自己与主节点的频率比率 R。
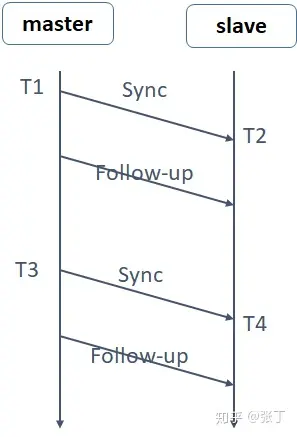
Master 持续发送 Sync 报文,紧跟着发 Follow_Up 携带发送时间戳 T1。Slave 记录收到 Sync 的本地时间 T2。下一轮同理,Master 发送携带 T3 的 Follow_Up,Slave 记录 T4。有了 T1、T3(主时钟基准)和 T2、T4(从时钟基准),Slave 计算:
R 就是主从频率比率。R = 1.00002 意味着 Slave 时钟比 Master 慢万分之零点二,后续所有计算都要乘以这个比率来修正。
延迟测量
知道频率比率还不够。报文在链路上传输需要时间,这个延迟也必须精确测出来。测量用 Pdelay_Req、PDelay_Resp、PDelay_Resp_Followup 三种报文完成:
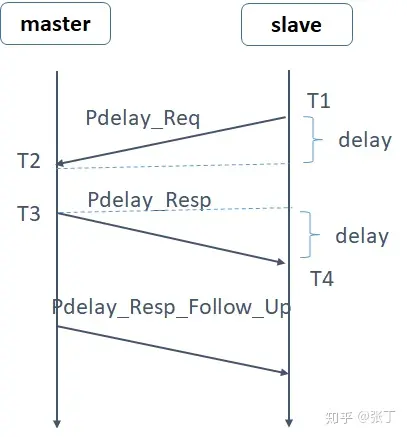
- Slave 发送 PDelay_Req,在物理层记录发送时间戳 T1
- Master 在物理层记录接收时间戳 T2
- Master 回复 PDelay_Resp 携带 T2,在物理层记录发送时间戳 T3
- Slave 记录收到 PDelay_Resp 的本地时间 T4
- Master 发送 PDelay_Resp_Followup 携带 T3
Slave 收集齐四个时间戳后计算链路延迟:
这个公式假设链路是对称的——报文双向传输延迟相同。在车载短距离以太网中,这个假设基本成立。公式中乘以 R 是为了把 Slave 侧的时间差换算到 Master 的时钟基准下,才能与 Master 侧的时间差做减法。
偏差校正
有了频率比率 R 和链路延迟 delay,Slave 就能用 Sync/Follow_Up 报文持续校正自己的时钟。
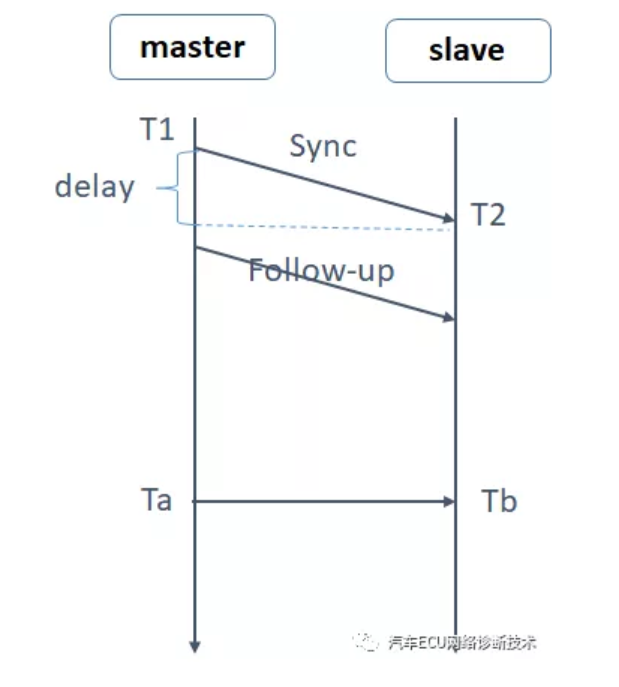
Slave 收到 Sync 报文时记录本地时间 Tb,从 Follow_Up 报文中读取 Master 的发送时间 T1。那么 Tb 时刻对应的主时钟时间为:
这就是同步的最终目标:给定任意本地时刻 Tb,Slave 都能换算出对应的主时钟时刻 Ta。所有节点完成这个换算后,全车就共享同一个时间基准了。
两种实现方案
车载时间同步有两种主流实现,分别对应 AUTOSAR 和 Linux 两个平台。
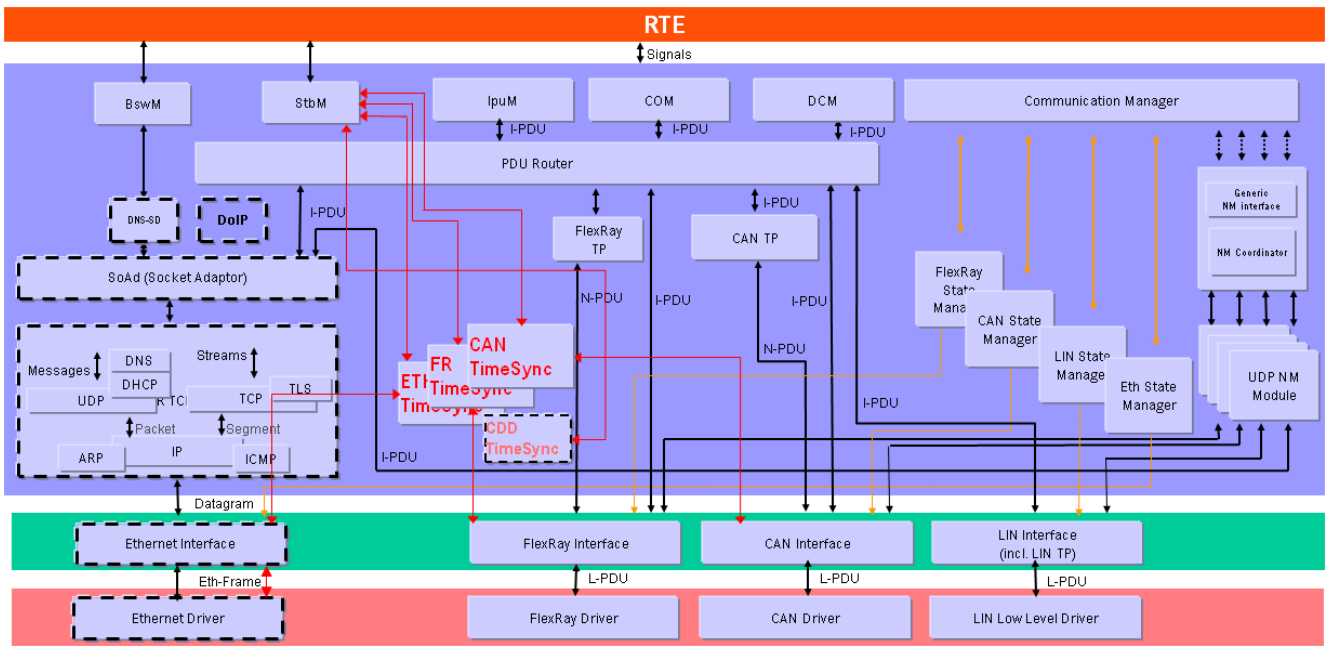
AUTOSAR 方案中,Ethernet TimeSync 模块基于 IEEE 802.1AS 实现 gPTP 协议解析,Ethernet Driver 和 Ethernet Interface 模块负责报文收发。StbM(Synchronized Time Base Manager)负责时间基准的统一管理与分发,为应用层提供全局时间戳服务。整个链路遵循 分层架构,从 MCAL 驱动层到服务层逐层封装。
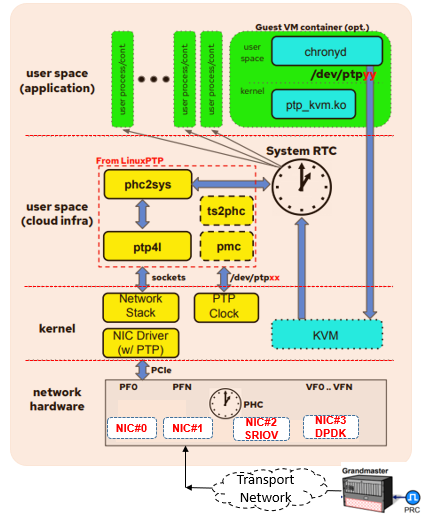
Linux 平台使用 LinuxPTP,运行在用户态,通过内核 API 访问硬件时钟。核心包含两个组件:ptp4l 遵循 IEEE 1588 标准,实现边界时钟(BC)、普通时钟(OC)和透传时钟(TC)功能;phc2sys 负责将 PTP 硬件时钟(PHC)与系统时钟同步。
两个方案在协议层面遵循同一套 gPTP 标准,可以互联互通。MCU 上跑 AUTOSAR 用 Ethernet TimeSync + StbM,SoC 上跑 Linux 用 LinuxPTP——同一个车载网络中两种方案通常共存。
域控制器从单域向跨域融合演进时,gPTP 的跨域级联精度如何保证?当 TSN 调度(802.1Qbv)和时间同步(802.1AS)同时部署在同一个车载以太网上,两者如何协同?这些问题正在成为下一代车载网络架构的核心挑战。