AUTOSAR 入门教程(2)基础篇二
🚀 AUTOSAR 作为汽车电子系统开发的行业标准,其**基础软件(BSW)**的模块化设计是提升 ECU 开发效率的关键。本文将深入解析 BSW 的分层架构和配置机制,帮助开发者理解如何通过标准化接口实现软硬件解耦。💡
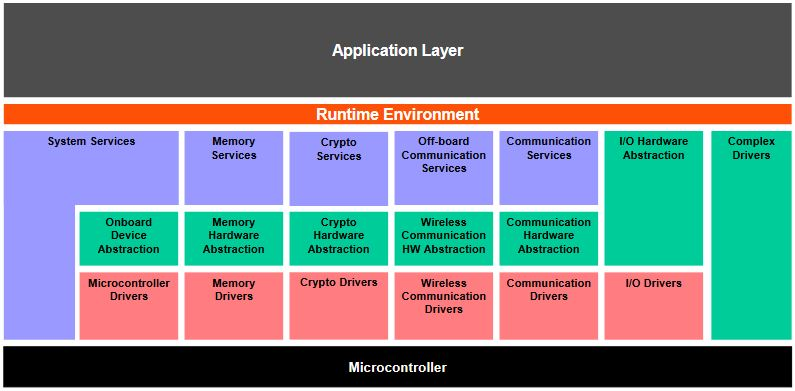
🏗️ 基础软件的分层架构
🔍 按功能划分的堆栈结构
AUTOSAR 基础软件根据服务类型划分为三大核心堆栈:
- 📡 通信堆栈
🔹 包含通信驱动程序(CAN/LIN 等)
🔹 通信接口(PDU Router)
🔹 通信服务(COM 模块) - 💾 内存堆栈
🔹 由内存驱动程序(Flash/EEPROM)
🔹 内存接口(MemIf)
🔹 内存服务(NvM)组成 - 🔌 I/O 堆栈
🔹 包括 I/O 驱动程序(DIO/ADC)
🔹 I/O 抽象层(Port 模块)
🤝 模块间的接口规范
1️⃣ AUTOSAR 接口
- 🌐 语言无关性:独立于编程语言和硬件平台
- 🎯 应用场景:用于 SWC 与 BSW 之间的数据交换
- ⚙️ 实现方式:通过端口(Port)机制实现组件连接
2️⃣ 标准化 AUTOSAR 接口
- 📜 官方定义:语法和语义由 AUTOSAR 标准严格规定
- 🏭 典型应用:提供 BSW 的标准服务(如诊断服务 DCM)
3️⃣ 标准化接口
- 💻 语言相关:基于特定编程语言(通常为 C)
- 🔄 使用范围:同一 ECU 内部模块间的交互
- 📌 示例:EcuM 与 BswM 之间的调度接口
⚙️ 配置机制的三种类型
🔧 预编译配置(Pre-compile)
- 📂 配置文件:
*_Cfg.c/h - 💡 特点:
- 通过宏定义实现条件编译
- 编译后配置固定不可修改
- 优化代码体积和执行效率
🔗 链接时配置(Link time)
- 📂 配置文件:
*_Lcfg.c/h - 🛠️ 实现方式:
- 通过外部常量传递配置
- 链接阶段完成最终配置
- 典型应用:内存分区配置
🔄 构建后配置(Post-build)
- 📂 配置文件:
*_PBcfg.c/h - 🚀 两种模式:
- 可加载式:动态修改配置结构成员
- 可选式:从预定义配置集中选择(结构数组形式)
- ✅ 核心优势:同一 ECU 可适配不同车型配置
💡 实践建议
1️⃣ 优先使用标准化 AUTOSAR 接口保证兼容性
2️⃣ 对实时性要求高的模块采用预编译配置
3️⃣ 需要多车型适配时选择构建后可选项配置
4️⃣ 通过 *_Cfg.h 文件快速定位模块配置项